论文题目:Retentive Network: A Successor to Transformer for Large Language Models
发表时间:2023 arxiv
论文作者:Yutao Sun, Li Dong, Shaohan Huang, Shuming Ma, Yuqing Xia, Jilong Xue, Jianyong Wang, Furu Wei
作者单位:微软亚洲研究院, 清华大学
1. 背景
1.1 介绍
Transformer是目前大语言模型的基础架构,最初提出的时候是为了解决模型顺序训练的问题。相较于RNN模型,Transformer模型解决了以下问题:
长序列依赖问题
RNN模型的输入是序列,只能按照顺序处理数据,并且因为存在梯度爆炸/消失的问题,无法捕捉到长序列的依赖关系。Transformer通过引入自注意力机制,考虑所有位置的信息,解决了长序列问题。
无法并行计算
传统的RNN模型需要按照顺序处理序列中的元素,无法进行并行计算。Transformer的自注意力和多头注意力可以并行计算,大大提高了训练和推理的效率。
训练效率低
RNN往往需要更多的训练步骤才能到达局部/全局最优。深层的RNN具有许多参数,并且这些参数大部分是相互关联的。
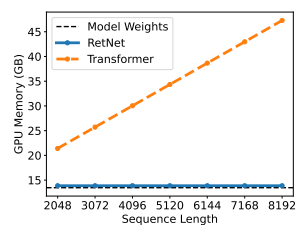
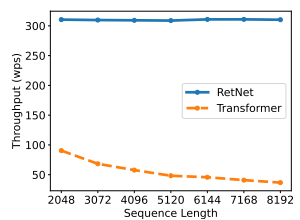
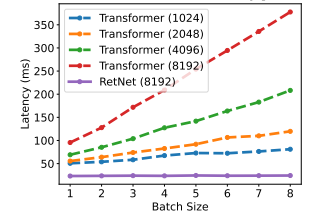
然而Transformer的训练并行性是以低效的推理为代价的,其每一步推理的的复杂度是O(N)的,不断增长的序列长度增加了GPU内存消耗和延迟,并降低了推理速度。因此,为了实现保留训练的并行性和有竞争力的性能,开发出了许多新的模型,但是实现上述目标存在不可能三角,即不能同时达成训练并行性,良好的性能与低推理成本。
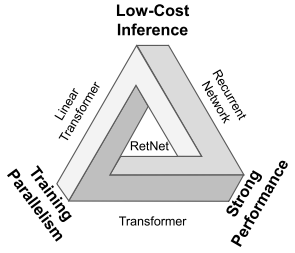
目前主要有三个研究方向:
Linear Transformer:主要处理方式是对k和v进行处理,但是此方法的建模能力和性能不如Transformer。
Recurrent Network:随着不断的优化,最大的缺点就是不能并行训练。
用其他机制替换注意力。
1.2 研究结果
提出了Retentive Network,同时实现了低成本推理,高效的长序列建模以及可媲美Transformer的性能和并行模型训练。引入了多尺度保留机制来替代多头注意力,该机制有三种范式:并行——使训练并行性能够充分利用GPU设备;循环——在内存和计算方面实现了高效的O(1)推理,显著降低部署成本和延迟;块循环表征——实现高效的长序列建模。通过并行编码每个局部块提高计算速度,同时循环编码全局块节省GPU内存。模型性能如下:
2 方法-Retentive Networks
先导:一文通透位置编码:从标准位置编码、旋转位置编码RoPE到ALiBi、LLaMA 2 Long(含NTK-aware简介)
RetNet架构和Transformer类似,也是堆叠L层同样的模块,每个模块内部包含两个子模块:一个multi-scale retention(MSR)和一个 feed-forward network (FFN)。
2.1 retention
首先给定一个输入序列{\{x_i\}}^{|x|}_{i-1}: x=x_1…x_{|x|}其中|x|代表序列的长度,经过Embedding得到词嵌入向量X^0。
对给定输入词嵌入序列X \in \mathbb{R}^{|x|×d}中每个时间步n的向量X_n \in \mathbb{R}^{1×d} 都乘以权重值w_v \in \mathbb{R}^{d×d}得到v_n \in \mathbb{R}^{1×d}:v_n = X_n ·w_v
然后有类似Transformer架构的Q和K的投影:Q=XW_Q,K=XW_K
其中W_Q,W_K \in \mathbb{R}^{d×d}是需要学习的权值。
假设现在有一个序列建模的问题,通过S_n \in \mathbb{R}^{d×d}将v_n映射为o_n向量:
s_n = As_{n-1}+K_n^{T}v_n\\ o_n=Q_ns_n=\sum_{m=1}^nQ_nA^{n-m}K_m^Tv_m
其中A \in \mathbb{R}^{d×d}是一个矩阵。
上面Q_ns_n展开:
\begin{aligned} Q_ns_n &=Q_n(As_{n-1}+K_n^Tv_n) \\ & =Q_n(A(As_{n-2}+K_{n-1}^Tv_n-1)+K_n^Tv_n)\\ & =Q_n(A^2s_{n-2}+A^1K_{n-1}^T+A^0K_n^Tv_n) \\ & …… \end{aligned}
对矩阵A,定义A为一个可对角化的矩阵:
A=\Lambda(\gamma e^{i\theta})\Lambda^{-1}
其中\gamma,\theta \in \mathbb{R}^d都是d维的向量,\Lambda是一个可逆矩阵,通过欧拉公式e^{ix}=cosx+i sinx,\gamma e^{i\theta}就是一个对角矩阵,对角元素的值就对应将\gamma和e^{i\theta}转成负数向量相乘再将结果转回实数向量的结果。
因此可以得到A^{n-m}=\Lambda(\gamma e^{i\theta})^{n-m}\Lambda^{-1},再将\Lambda吸收进W_Q和W_K,也就是W_Q\Lambda和\Lambda^{-1}W_K^T,分别用W_Q和W_K^T替代,当作学习的权重,最后将\gamma修改为一个实数常量,最终得到o_n的计算公式:
借助欧拉公式,e^{i(-m)\theta}=[cosm\theta_1,-sinm\theta_2,...,cosm\theta_{d-1},-sinm\theta_d],转为复数形式就是:e^{i(-m)\theta}=[cosm\theta_1-sinm\theta_2,...,cosm\theta_{d-1}-sinm\theta_d] ,刚好对应e^{im\theta}的共轭:e^{im\theta}=[cosm\theta_1+sinm\theta_2,...,cosm\theta_{d-1}+sinm\theta_d],所以可得o_n=\sum_{m=1}^n\gamma^{n-m}(Q_ne^{in\theta})(K_me^{im\theta})^\dagger v_m。Q_ne^{in\theta}和K_me^{im\theta}就是对Q_n和K_m应用旋转式位置编码。其思想是采用绝对位置编码的形式实现相对位置编码
一、 并行训练表示
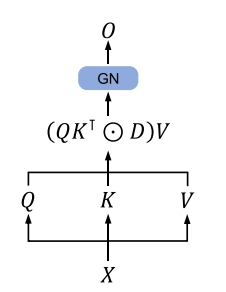
如上图为Retention层的并行表示,GN表示GroupNorm,其公式定义如下:
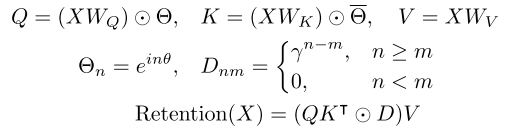
\bar\Theta对应\Theta矩阵的共轭,D是一个下三角矩阵,通过这个矩阵可以根据距离削弱关系,在n<m中出现0表示一个自回归关系,也就是只能注意到前面的内容,达到如下图的结果:
对应的代码实现如下:
def forward(self, X):
sequence_length = X.shape[1]
# 计算D矩阵,权重
D = self._get_D(sequence_length).to(self.W_Q.device)
Q = (X @ self.W_Q)
K = (X @ self.W_K)
# 应用xpos方法,获得旋转式坐标编码
Q = self.xpos(Q)
K = self.xpos(K, downscale=True)
V = X @ self.W_V
# 计算注意力得分,通过Q和K的转置矩阵相乘,然后乘以D进行缩放
ret = (Q @ K.permute(0, 2, 1)) * D.unsqueeze(0)
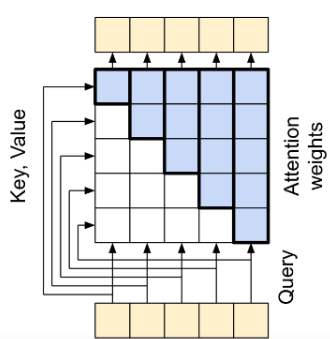
return ret @ V二、 循环推理表示
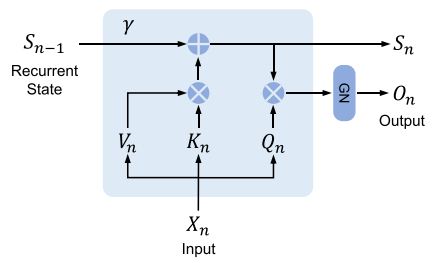
如上图为Retention层的循环表示,其公式定义如下:

可以看到在推理阶段,RetNet在计算当前时间步n的输出O_n只依赖上一个时间步输出的状态矩阵S_{n-1}。
与Transformer在每个时间步的计算要先算Q_n和前面所有时间步的K相乘得到attention权值再和V相乘求和相比,就是将计算顺序改了一下,先计算了K_n和V_n的相乘,并一直累加到状态矩阵S_n上,最后再和Q_n相乘。
def forward_recurrent(self, x_n, s_n_1, n):
Q = (x_n @ self.W_Q)
K = (x_n @ self.W_K)
Q = self.xpos(Q, n+1)
K = self.xpos(K, n+1, downscale=True
V = x_n @ self.W_V
# 计算当前时间步的状态s_n,它是上一个时间步的状态s_n_1和当前时间步的K与V的注意力加权和
# K: (batch_size, 1, hidden_size)
# V: (batch_size, 1, v_dim)
# s_n = gamma * s_n_1 + K^T @ V
s_n = self.gamma * s_n_1 + (K.transpose(-1, -2) @ V)
# 返回当前时间步的Q与s_n的乘积以及更新后的状态s_n
return (Q @ s_n), s_n三、记忆的组块循环表示
并行表示和循环表示的混合形式可用于加速训练,特别是对长序列。将输入分成多个块,在块内遵循并行表示进行计算,而在块间按照循环表示传递,第i个块的Retention输出为:
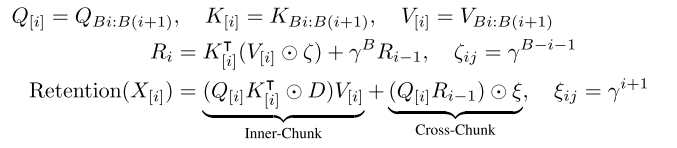
B表示第i块的长度。
def forward_chunkwise(self, x_i, r_i_1, i):
"""
Chunkwise representation of the retention mechanism.
x_i: (batch_size, chunk_size, hidden_size)
r_i_1: (batch_size, hidden_size, v_dim)
"""
batch, chunk_size, _ = x_i.shape
D = self._get_D(chunk_size)
Q = (x_i @ self.W_Q)
K = (x_i @ self.W_K)
Q = self.xpos(Q, i * chunk_size)
K = self.xpos(K, i * chunk_size, downscale=True)
V = x_i @ self.W_V
# 计算当前块的状态r_i
r_i =(K.transpose(-1, -2) @ (V * D[-1].view(1, chunk_size, 1))) + (self.gamma ** chunk_size) * r_i_1
# 计算当前块内的注意力输出
inner_chunk = ((Q @ K.transpose(-1, -2)) * D.unsqueeze(0)) @ V
# 计算跨块注意力权重
#e[i,j] = gamma ** (i+1)
e = torch.zeros(batch, chunk_size, 1)
for _i in range(chunk_size):
e[:, _i, :] = self.gamma ** (_i + 1)
# 计算跨块的注意力输出
cross_chunk = (Q @ r_i_1) * e
# 返回当前块内的注意力输出和跨块的注意力输出的和,以及更新后的状态r_i
return inner_chunk + cross_chunk, r_i2.2 多尺度保留Gated Multi-Scale Retention
Gated Multi-Scale Retention,MSR 多尺度保留机制类似多头注意力机制,模型的维度d_{model},每个头的维度为d,共有d_{model}/d个头,每个头和多头注意力一样使用不同的W_Q,W_K,W_V,同时每个头采用不同的\gamma常量。
对输入X,MSR层的输出为:
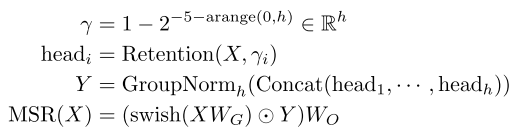
又因为每个头采用了不同的\gamma常量,所以每个头的输出需要单独做normalization,这里利用GroupNorm的尺度不变性来提高保留层的数值精度,在GroupNorm内乘以标量值不影响输出和反向梯度。
将上面式子中的QK_T换成QK_T/\sqrt{d};D_{nm}换成D_{nm}/\sqrt{\sum_{i=1}^nD_{ni}};R_{nm}换成R_{nm}/max(|\sum_{i=1}^nR_{ni}|,1);由于尺度不变性,这些修改不影响最终结果,同时稳定了正向和反向过程的数据。
def forward_chunkwise(self, x_i, r_i_1, i):
"""
Chunkwise representation of the retention mechanism.
x_i: (batch_size, chunk_size, hidden_size)
r_i_1: (batch_size, hidden_size, v_dim)
"""
batch, chunk_size, _ = x_i.shape
D = self._get_D(chunk_size)
Q = (x_i @ self.W_Q)
K = (x_i @ self.W_K)
Q = self.xpos(Q, i * chunk_size)
K = self.xpos(K, i * chunk_size, downscale=True)
V = x_i @ self.W_V
r_i =(K.transpose(-1, -2) @ (V * D[-1].view(1, chunk_size, 1))) + (self.gamma ** chunk_size) * r_i_1
inner_chunk = ((Q @ K.transpose(-1, -2)) * D.unsqueeze(0)) @ V
#e[i,j] = gamma ** (i+1)
e = torch.zeros(batch, chunk_size, 1)
for _i in range(chunk_size):
e[:, _i, :] = self.gamma ** (_i + 1)
cross_chunk = (Q @ r_i_1) * e
return inner_chunk + cross_chunk, r_i2.3 Retention网络的总体结构
对L层Retention网络,通过堆叠MSR和FFN来构建模型,最终过程表示如下:
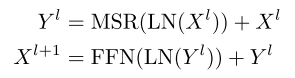
LN为层标准化,FFN(X)=gelu(XW_1)W_2,W_1,W_2是参数矩阵。
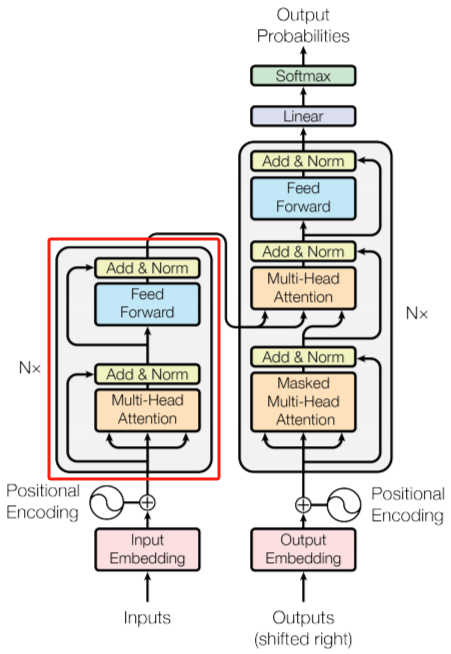
类似于Transformer的红框部分,最主要的区别就是把MHA换成MSR:
整体代码如下:
class MultiScaleRetention(nn.Module):
def __init__(self, hidden_size, heads, double_v_dim=False):
super(MultiScaleRetention, self).__init__()
self.hidden_size = hidden_size
self.v_dim = hidden_size * 2 if double_v_dim else hidden_size
self.heads = heads
assert hidden_size % heads == 0, "hidden_size must be divisible by heads"
self.head_size = hidden_size // heads
self.head_v_dim = hidden_size * 2 if double_v_dim else hidden_size
# 为每个头计算指数衰减的gamma值
self.gammas = (1 - torch.exp(torch.linspace(math.log(1/32), math.log(1/512), heads))).detach().cpu().tolist()
self.swish = lambda x: x * torch.sigmoid(x)
# 定义输入和输出线性变换的可学习参数
self.W_G = nn.Parameter(torch.randn(hidden_size, self.v_dim) / hidden_size)
self.W_O = nn.Parameter(torch.randn(self.v_dim, hidden_size) / hidden_size)
self.group_norm = nn.GroupNorm(heads, self.v_dim)
# 创建一个SimpleRetention模块列表,每个gamma值对应一个
self.retentions = nn.ModuleList([
SimpleRetention(self.hidden_size, gamma, self.head_size, double_v_dim) for gamma in self.gammas
])
def forward(self, X):
# 对X应用每个单独的retention机制并收集结果
Y = []
for i in range(self.heads):
Y.append(self.retentions[i](X))
Y = torch.cat(Y, dim=2)
Y_shape = Y.shape
Y = self.group_norm(Y.reshape(-1, self.v_dim)).reshape(Y_shape)
return (self.swish(X @ self.W_G) * Y) @ self.W_O
def forward_recurrent(self, x_n, s_n_1s, n):
# 对X的一个切片应用每个单独的retention机制并收集结果和状态
Y = []
s_ns = []
for i in range(self.heads):
y, s_n = self.retentions[i].forward_recurrent(
x_n[:, :, :], s_n_1s[i], n
)
Y.append(y)
s_ns.append(s_n)
Y = torch.cat(Y, dim=2)
Y_shape = Y.shape
Y = self.group_norm(Y.reshape(-1, self.v_dim)).reshape(Y_shape)
return (self.swish(x_n @ self.W_G) * Y) @ self.W_O, s_ns
def forward_chunkwise(self, x_i, r_i_1s, i):
batch, chunk_size, _ = x_i.shape
# 对X的一个切片应用每个单独的retention机制并收集结果和状态
Y = []
r_is = []
for j in range(self.heads):
y, r_i = self.retentions[j].forward_chunkwise(
x_i[:, :, :], r_i_1s[j], i
)
Y.append(y)
r_is.append(r_i)
Y = torch.cat(Y, dim=2)
Y_shape = Y.shape
Y = self.group_norm(Y.reshape(-1, self.v_dim)).reshape(Y_shape)
return (self.swish(x_i @ self.W_G) * Y) @ self.W_O, r_is总结
简单来说,retnet = linear attention + RoPE(旋转式位置编码) + 显式衰减(即 γ),相较于RWKV有进步,简化了模型设计。但是,显示衰减也是RNN被诟病的原因,因为对于长序列,RNN必然不能有效地获得全局依赖,同时也意味着它会对prompt的形式比较敏感。
"prompt" 是指向模型提供输入以引导其生成特定输出的文本或指令。它是与模型进行交互时用户提供的文本段落,用于描述用户想要从模型获取的信息、回答、文本等内容。Prompt 的目的是引导模型产生所需的回应,以便更好地控制生成的输出。
对于语言模型,prompt 可以是一个简短的问题、一个完整的段落,或者是一组指令,这取决于用户的需求和场景。在生成文本时,模型会试图理解 prompt 并根据其理解生成相应的响应。这就是为什么 prompt 很重要,因为它直接影响着模型生成的文本的内容、风格和质量。