论文题目:Graph Spatio-Temporal Networks for Condition Monitoring of Wind Turbine
发表时间:2024 IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, (影响因子:8.7)
论文作者:Xiaohang Jin, Shengye Lv, Ziqian Kong, Hongchun Yang, Yuanming Zhang, Yuanjing Guo, Zhengguo Xu
作者单位:浙江工业大学,浙江大学
1. 背景
1.1 介绍
今年来,风能已经成为了全球新能源市场的关键参与者。风力发电机组作为大型风力发电设备,大多安装在风能资源丰富的沙漠、滩涂等偏远地区。在动态工作条件下,故障频繁发生。因此,有必要开发一种高效、高精度的状态检测框架。
目前,已经有许多状态检测方法,可以分为基于模型的方法和数据驱动的方法。前者适合数据量有限的场景,依赖于风力涡轮机(WT)的一些物理先验知识来构建物理模型。后者则依赖于广泛的数据集,从这些数据集中提取有效特征来监测状态。
回顾以前的数据驱动的状态检测相关研究,根据提取的特征之间的关系,主要分为空间尺度、时间尺度和时空融合尺度。大多数的状态监测模型采用级联神经网络,它们智能处理限定在欧式空间中的数据。对真实的物理场景,上述方法没有考虑风力涡轮机内部各组件的信号之间的连接和因果关系。
1.2 本文成果
为了融合不同组件或子系统之间的交互和风力涡轮机结构信息的先验知识,提出一种图时空网络(GSTN)状态检测框架。
1. GNN利用风力涡轮机组件结构信息和传感器之间的相关性等先验知识来表示数据的空间特征。
2.GAT层用于捕获风力涡轮机的内部结构信息,然后使用全局和局部注意力嵌入层以及LSTM层来捕获每个传感器的时间序列信息,等到时空融合特征。
3.通过图级监控和节点级监控来判断WT的状态。然后利用多节点故障传播机制验证故障的真实性。
2. 问题表述
要对WT进行异常检测,首先要建立WT的正常行为模型。检测数据,当预测特征于实际特征存在一定程度的偏差时,WT可以被识别为异常。
考虑到WT的空间相关性,有多个传感器组成的图结构表示WT系统的拓扑结构。构造有向图G=(V,E),其中V表示数据采集与监视控制系统(SCADA)的传感器节点的集合,E表示从一个节点到另一个节点的信息传送的边的集合。
为了更好地存储有向图的数据,采用特征矩阵X_t\in \mathbb{R}^{N×F}和邻接矩阵A\in\mathbb{R}^{N×N}分别作为有向图的图信息和节点之间的关系,F表示每个节点特征的维数(本文为1)。在SCADA系统的每个时间步t,特征矩阵X_t包含了WT传感器的多维信号,邻接矩阵A可以反应传感器之间的信号传递关系。如果一个传感器节点能对另一个节点产生影响,则意味节点之间可以有向传递。如果节点i对节点j存在传递关系,则Aij被设置为1,否则为0。
最终,WT的无监督异常检测问题可以描述为如下:有向图序列[G1,G2,...,GT]输入到函数f,该函数可以通过图拓扑和序列定时来提取WT的正常行为特征。因此,有向图序列由两部分特征矩阵序列X1:T 和邻接矩阵A。前者表示传感器的数据,后者表示传感器节点之间的关系。用于WT的状态监测的映射方法如下:
其中XT+1 表示序列X的下一步骤实际特征矩阵,并且\hat{X_{T+1}}表示预测的矩阵。X_{dev}是能反映有向图G的异常情况的偏差特征矩阵。
GNNs将动态学习的范式扩展到图的领域,在GNN的框架下,数据由图的拓扑结构表示,它涉及到节点间的信息传播和节点特征的更新,从而提取出更多与任务相关的有用信息。本文借鉴GAT在分析节点间注意力机制方面的优势,用于WT的状态监测。
3. 提出的框架
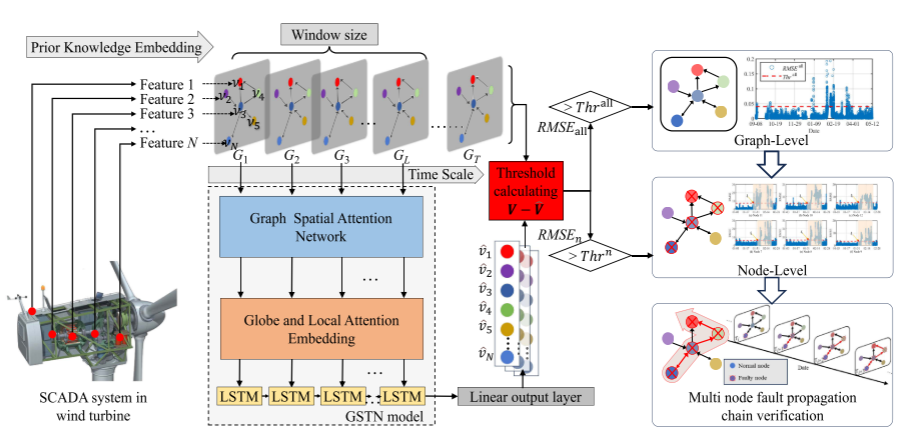
提出的状态监测框架的过程分为四个步骤:
1、数据准备和先验知识嵌入;2、GSTN离线训练;3、GSTN在线图级状态监测;4、GSTN在线节点级状态监测和多节点故障传播链验证。
3.1 先验知识图构造
采用自顶向下的方法和特征分类方法嵌入先验知识。首先,自顶向下的方法将WT的状态监测体系结构划为WT层、子系统和组件层以及监测特征层。
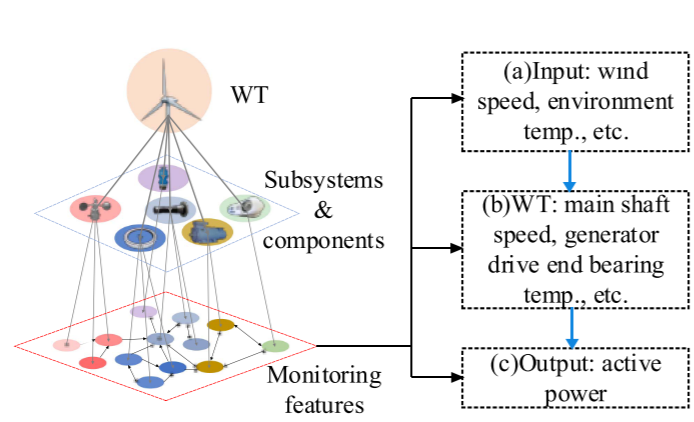
这些层次间的关系说明了WT是由各种子系统和组件组成的,各种组件之间具有一定的结构和因果关系。SCADA数据中与某个组件相关的特征可以共同反应监控特征层中该组件的运行状态。
然后,在监测特征层采集的原始信号可分为三类:1、环境信息;2、WT内部信息;3、WT输出信息。环境信息在很大程度上影响着WT的工作条件和运行状态;WT系统的内部构件具有先验的结构连接关系;WT的输出信息由其内部系统的条件决定。监测特征之间的结构和因果关系被用于构造有向图。
通过构造这种先验有向图结构,利用各种特征联合提取构件的状态特征,如发电机转速、发电机轴承温度、发电机绕组温度等各种特征通过WT内部的构成要素的结构关系而相互关联。
3.2 GSTN模型
提出的GSTN模型由四个模块组成,分别是GAT层、全局和局部注意力嵌入层、LSTM层和线性输出层。首先,基于嵌入的先验知识,将风电机组SCADA数据转化为先验图数据序列;然后,GAT可以捕获空间特征。由于使用了滑动窗口,全局和局部注意力嵌入层使用注意力机制来提取窗口中的全局和局部信息;最后LSTM和线性输出层可以集成空间和时间特征,以预测每个节点的未来行为。
在图注意力机制中,利用GAT来捕捉传感器节点之间的空间特征,从而对空间依赖性进行建模。基于多头注意力GAT层,节点y_i\in\mathbb{R^{F'}}可以表示为:
其中\alpha^T表示单层前馈神经网络的可学习参数,k\in N_i表示节点i的邻居,F'是G的每个节点的新维数,M是多头数量,\alpha^m_{ij}是由第m个注意力多头计算的归一化注意力系数。为了集成来自所有节点的空间特征,节点的输出通过以下方式连接:P= \overset{N}{\mathop{\|}\limits_{i=1}}y_i。其中N是先验图G中的节点数,P表示通过GAT层从先验结构图G建模的空间特征。
空间依赖建模之后,利用全局和局部注意力嵌入层以及LSTM来集成时空特征,由于GAT层的输出数据是具有一定窗口长度L的图序列,全局和局部注意嵌入层利用滑窗计算每个向量对整个序列的贡献,Pt表示来自GAT层的某个时间t的特征矩阵。全局和局部注意力嵌入层可以表示为:
其中V是可学习矩阵,\tau_t表示窗口中每个时间步的局部特征;\beta_t表示归一化函数后的局部重要性系数;\gamma表示整个窗口的全局信息。全局和局部信息获取如下:d_t=[p_t||\gamma]。其中dt是通过局部和全局特征的级联操作的集成向量。然后,通过LSTM单元处理dt,以提取额外的时间信息。在上述时空特征提取之后,输出ht表示与整个窗口的输入图形数据Gt相对应的时空信息的综合特征。
最后,使用线性回归层来计算最后一个LSTM单元hL的输出向量。它可以预测先验有向图G中每个节点的未来状态。
3.3 GSTN在线图形级状态监测
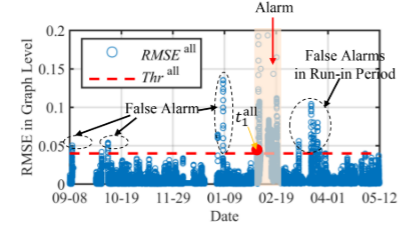
训练好多GSTN模型用于预测预期的正常行为。由于在故障发生的早期预警阶段不可能定位特定的组件和节点,因此使用图级状态监测来确定WT的整体状态。先验有向图G中的整个图的预测残差指示系统的异常程度。本文采用均方根误差作为WT图级条件的指标,其中窗口的第i个RMSE可以计算为:RMSE_i^{all}=\sqrt{\frac{1}Q·\frac{1}N\sum_i^{Q+i}\sum_{n=1}^{N}(\hat{y_i^n}-y_i^n)^2},其中N是所有节点的数量,Q是窗口的大小,\hat{y_i^n},y_i^n分别是第n个节点中第i个SCADA数据的预测值和实际值。
在图级状态监测任务中,使用指数加权移动平均(EWMA)控制图。连续三次超过下面公式中阈值Thr表示整个先验图的早期异常警告,EWMA控制图的图级状态监控公式为:
其中\bar{r}^{all}是整个图上第i个窗口的RMSE的均值;\lambda^{all}\in[0,1]表示当前窗口的重要性;\mu_r^{all}和\sigma^{all}_r是输出残差RMSE_i^{all}的标准差和平均值;K^{all}是决定全局先验图G上控制上线(upper control limit,UCL)的系数。
将多个特征融合到一个图中,用于图级的状态监控。该方法能够反映风电机组的整体状况,但忽略了风电机组不同部件的特征信息。
3.4 GSTN在线节点级状态监控
基于图中节点的拓扑结构,提出了一种新的WT节点级异常检测策略。预构造有向图G中每个节点的预测残差表示相应节点的异常程度。EWMA控制图也适用于状态监测的节点。
考虑到WT的动态工作条件、环境变化、传感器问题等,节点的RMSE总是大于阈值Thrn。由于单个传感器提供的信息不足,节点级监测结果不能准确反映风电机组的整体健康状况,且会引起误报。
为了克服图级和节点级状态监测的问题,提出了一种基于图的多节点故障传播链方法。在空间尺度上,来自每个节点的信息可以表征WT的各种组件的状况。在时间尺度上,多个节点监测到的时序信息可以综合反映故障信息在不同部件之间的传播和影响。
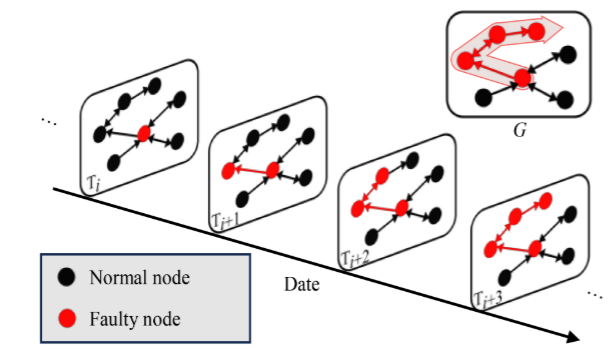
多节点故障传播链的定义是:如果一个节点出现异常情况,认为它是一个故障节点,它可以在一段时间内将故障信息传递给其他相邻节点,导致相邻节点在随后的一段时间内出现异常。如图所示,只有当上述传递关系与构造的图G的结构相匹配时,才能建立故障传播链。经过实验,符合故障传播的警报是真正的早期警告。否则,在虚警的情况下,不同节点的RMSE仅不规则地超过阈值Thrn。在建立故障传播链并确定真告警后,可以将多节点中最早告警的节点判断为故障起始点,该节点可以是WT的故障源,也可以是靠近故障源的位置。
4. 实验
4.1 数据描述和预处理
SCADA数据收集时间为2016年1月至5月。2017年在中国东南部的一个风电场。在WT的操作期间,观察到假警报情况和真故障警报情况。真正的故障案例涉及非驱动端轴承在运行过程中磨损和温度升高,最终导致发电机轴承失效。
在数据预处理阶段,删除所有含有缺失值的序列数据,以避免缺失值的影响。然后,删除异常数据,包括有功功率为0的WT停机数据、限功率运行数据和异常值数据。最后进行归一化。
4.2 先验知识引导的图构造
根据第三节中描述的自上而下的方法,选择出WT传输系统的相关部件、环境相关部件和电网控制部件。下表显示了选择用于表示WT条件的SCADA功能。
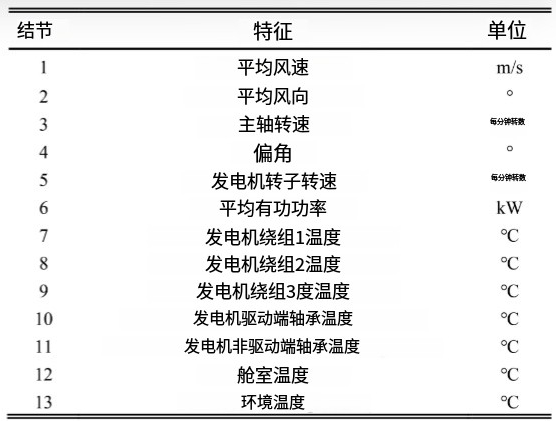
下图为WT的结构示意图,依靠特征分类方法,监控特征层的SCADA数据被构造为如图(B)所示的有向图G。
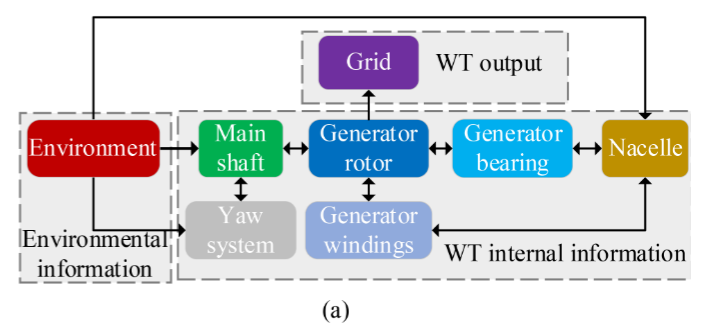
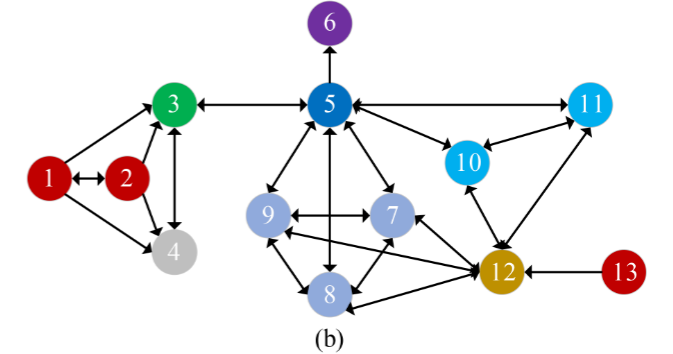
在图(B)中,每个节点表示SCADA特征,并且箭头指示从一个节点传递到另一个节点的信息。例如,主轴、偏航系统、发电机转子等属于WT内部信息。环境通过影响主轴、机舱和偏航系统来影响整个WT的运行,因此箭头从环境指向主轴、机舱和偏航系统。因此,节点1和2指示指向节点3和4的关于风的监视器信息。反映环境温度的节点13,其指向机舱温度。在WT内部系统中,偏航系统和主轴轴承相互作用。根据WT的内部结构关系,主轴轴承连接齿轮箱轴承和发电机轴承。因此,节点3被链接到节点5。
4.3 图形级状态监控
将图级在线状态监测应用于所构建的正常行为模型。基于该方法,当有向图中所有节点的RMSE值连续三次超过阈值Thrall时,就会发出警报。
然而,图级在线状态监测无法区分这些假警报和真故障警报,并解释假警报的原因。
4.4 节点级状态监控
考虑到图中多个节点之间的空间结构关系可以提供对WT条件的更全面的理解,多节点预测和残差计算作为节点级别监控的一部分进行。
为了分析多节点故障信息之间的关系,引入故障传播链机制对状态监测结果进行验证和解释。
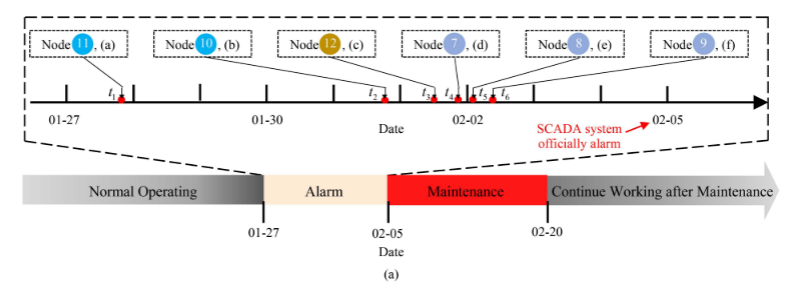
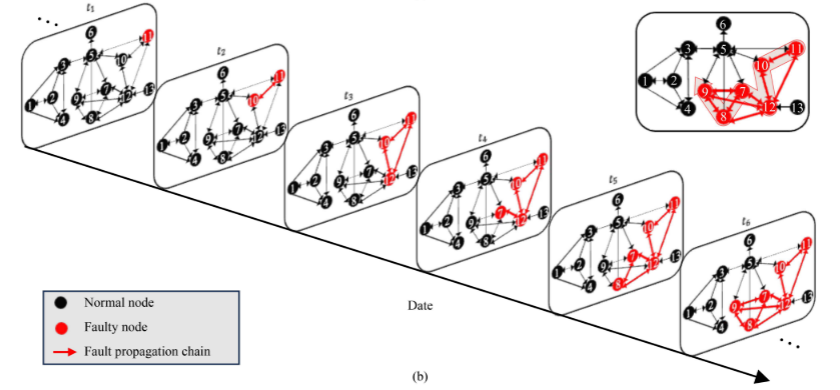
图A显示出了WT的多个节点的警报时间轴。报警时间为t1至t6。同时,告警序列符合图B所示的图形结构关系,符合故障传播链机制的可行性。
利用故障传播链机制,将非驱动轴承温度节点识别为故障传播链的起始点,并将其视为与故障源相关联的节点。这些调查结果可有助于决策以及操作和维护。
5. 结论
本文提出了一种风力发电机状态监测方法-GSTN。WT的先验知识用于构造有向图,其中SCADA数据中的每个特征被视为节点。利用图中节点的时空相关性来解释故障的发生,避免了虚警的发生。状态监控结果和节点级故障传播链的验证有助于确定故障并帮助定位故障发生的最早位置。
提出的GSTN可以与故障机制相结合,并用于分析WT的子系统。同时,还可以开发其他可解释的方法,将时空图网络和领域知识结合起来。
========================================================================
总结:
创新点:
分层级实现空间和时间特征融合,实现时空预测
充分利用先验知识构建图的关系
故障传播链的概念很好的解释了传播的概念
可改进之处:
=======================================
导师意见:
搜索相关论文,查看部件的检测是否是热门话题——查看论文引用文献是否涉及相关的内容,是否为顶刊
结果:
SCADA数据采集系统,包含部件
Condition monitoring of wind turbines with the implementation of spatio-temporal graph neural network, Engineering Applications of Artificial Intelligence, 7.5 一区
A conditional convolutional autoencoder-based method for monitoring wind turbine blade breakages, IEEE Transactions on Industrial Informatics, 11.7
Renewable Energy, 9